Ein weiteres Gerät, dessen Entwicklung noch in der Zeit von Leonhardt Reglerbau begann, ist ein vollwertiger Genset-Controller GCP30.
Obwohl die Produktion schon vor 10 Jahren ausgelaufen ist, sind diese Regler (GCP30, AMG2, MFR3, PCM1, RGN04-4, etc.) noch heute in Betrieb. Der Grund dafür ist, dass sie platzsparend, flexibel und reparaturfreundlich sind. Im Inneren des Gehäuses befinden sich mehrere Einschubplatten, die sehr einfach ausgetauscht werden können.
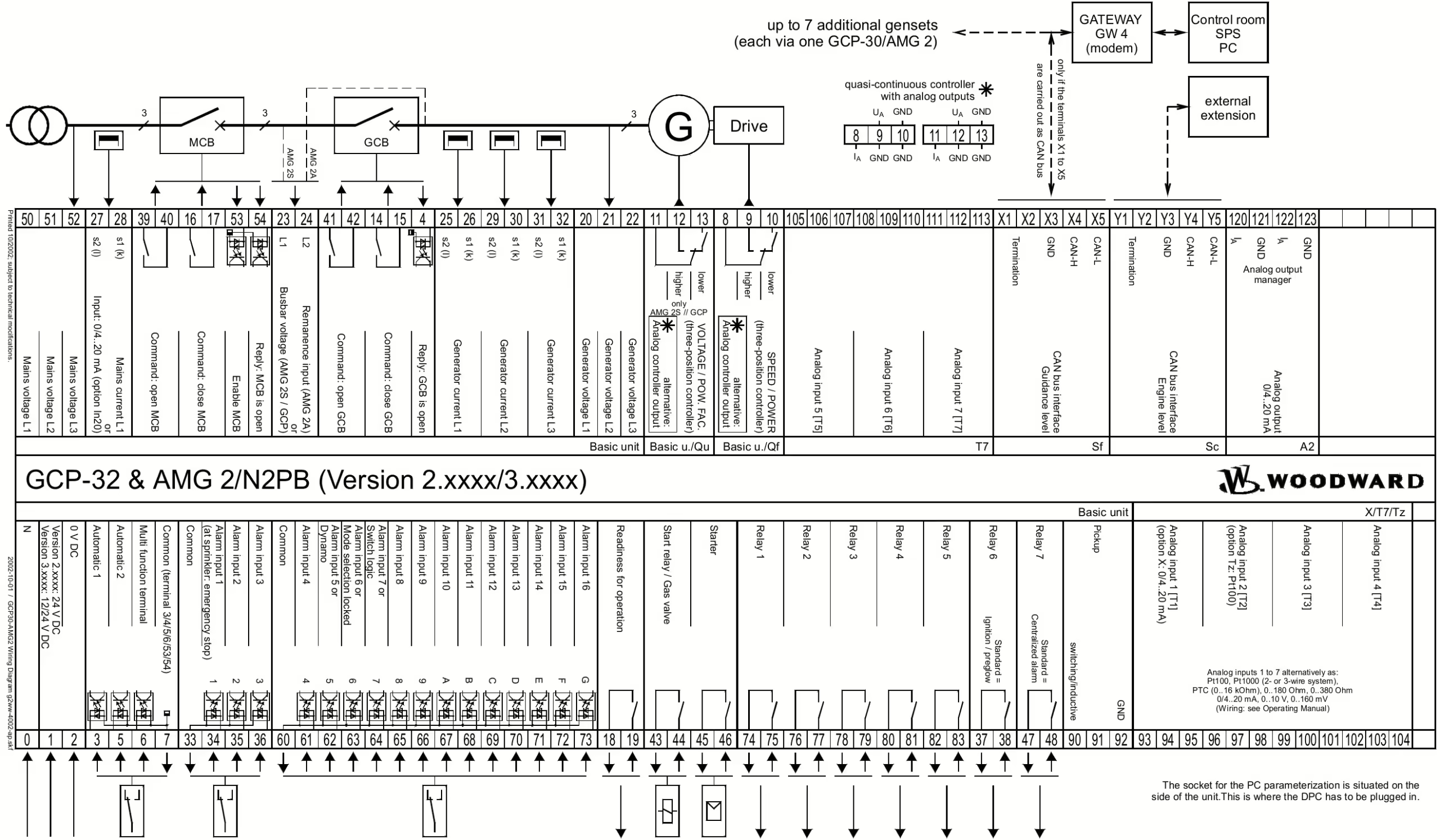
Gleichzeitig bietet der modulare Aufbau ein hohes Maß an Flexibilität. Dieses Anschlussschema gibt einen kurzen Überblick über die verfügbaren Optionen:
Ein weiterer Vorteil dieser Geräte besteht darin, dass sie mit anderen Produkten von Woodward bzw. Leonhardt Reglerbau, wie z.B. dem Leistungsschalter-Steuergerät „LS4“, dem Schnittstellenkonverter „GW4“ und vielen anderen kompatibel sind, bzw. es ermöglichen, komplexe Netzwerke aus mehreren Gensets zu betreiben.
Ein sehr ähnliches Prinzip verfolgt auch das moderne easYgen3000.
Wie bereits erwähnt wurde, GCP30 sind auch unter kundenspezifischen Folien zu finden, wie in diesem Beispiel:
GCP30 auf der einen und PCM1 auf der anderen Seite.
Es macht keinen Sinn detaliert über alle Optionen zu schreiben, da diese in dem Nachfolger easYgen3000XT ebenfalls vorhanden sind und im Falle des Retrofits keine Schwierigkeiten bereiten. Hier sind nur wenigen Optionen:
Option SC10: MDEC
geöffnete MDEC-ECU
Damit kann auf PIMs komplett verzichtet werden und Fehler können direkt im Klartext aus dem GCP30 ausgelesen werden.
Dies war lange Zeit ein Problem bei der Modernisierung einer Anlage mit MDEC – Motorsteuergerät. Da MTU keinen J1939 Standard verwendet, war es nicht möglich auf die Sensordaten zuzugreifen.
Vor kurzem hat die Firma Woodward aus Stuttgart ein kostenpflichtiges Update für easYgen3500XTP2 – Option K58 herausgebracht, mit dem es nun möglich ist direkt über CAN-BUS auf MDEC zuzugreifen und zu steuern.
MDEC – Menü in easYgen3500XT
ist nur Schade, dass dieses Update nicht vor mehreren Jahren erschienen ist.
Parametrierung
Zur Parametrierung wird das alte Programm aus der Zeit von Leonhard-Reglerbau – LeoPC1 – verwendet. Die Installation ist einfach. Immer weiterklicken und auf keinen Fall das Installationsverzeichnis ändern. Die Parameterdateien werden sonst nicht richtig zugeordnet.
Die Konfigurationsdateien für das Gerät findet man auf der easygen.org – Seite. Und auch hier sollte man unbedingt darauf achten, dass die *.cfg – Datei in das LeoPC1 – Verzeichnis gehört und *.asm in LeoPC1\Tools. Nur dann wird die Konfigurationsdatei geöffnet.
Ein weiterer Hinweis: Ab Windows 8 benötigt man Administratorrechte, um Änderungen im Verzeichnis Program Files (x86) vorzunehmen. Aus diesem Grund sollte LeoPC1 als Administrator gestartet werden:
Der Datenaustausch zwischen dem Gerät und dem LeoPC1 erfolgt über die TTL-Schnittstelle oder das Woodward DPC-Kabel.
Ist alles vorbereitet:
Parameterdatei im richtigen Verzeichnis,
geöffnet,
GCP30 angeschlossen und
DPC-Schnittstelle aktiviert:
auf der Frontseite Tasten Display + Setpoint gleichzeitig drucken,
Password 0002 eingeben und
Direct Para. auf Ja setzen.
Achtung! Die Freigabe der DPC-Schnittstelle schaltet den CAN-BUS ab. Als Folge kann GW4 sofort Alarm auslösen. Sobald Drehzahl erkannt wird, schaltet DPC wieder aus und CAN-BUS geht in Betrieb.
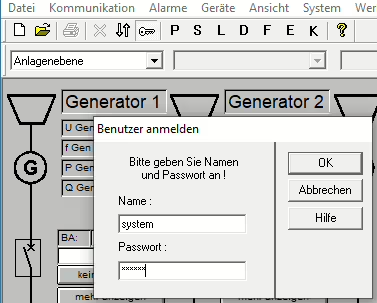
Als erstes Meldet man sich im LeoPC1 an, indem man auf Schlüssel klickt und system/systemeingibt:
Danach muss beim ersten Start unter Geräte -> Einstellungen -> Allgemeine Einstellungen unter DatenkommunikationDirekt – Treiber ausgewählt und der richtige COM-Port konfiguriert werden.
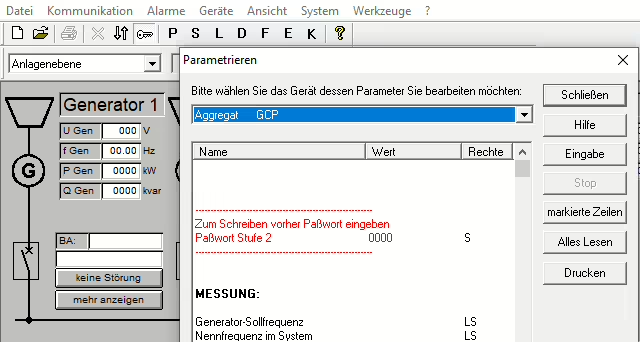
Wenn alles richtig ist, kann mit dem Parametrieren begonnen werden. Einfach auf P klicken und wenn sich das Parametrierfenster öffnet – auf Alles lesen.
as Auslesen dauert länger als eine Minute, es wird kein Status angezeigt, nur der Scrollbalken bewegt sich von Zeit zu Zeit nach unten.
Empfehlungen:
gleich die geladenen Parameter zu PDF auszudrucken, da in diesem Format sie einfacher zu lesen sind.
willst Du Parameter anpassen – gleich das Schreibpasswort der Stufe 2 eingeben – 0002.
Leittechnik
Das GCP30 selbst verfügt nur über einen CAN-BUS zur Anbindung an die übergeordnete Leitstelle. Andernfalls wäre es noch komplizierter, sich in den Geräteversionen zu orientieren, wie es bei MFR2 der Fall ist.
Diese Aufgabe der Konvertierung von einem CAN-Protokoll in ein anderes übernimmt der GW4 Konverter:
nahezu alle zu damaligen Zeiten gängige Protokolle und Medien wurden von diesem kleinem Gerät bedient.
GW 4/232 – RS232 + Modbus RTU
GW 4/485 – RS485 + Modbus RTU
GW4/232/MDM02 – speziell für die Ansteuerung des US Robotics Modems ausgelegt.
GW 4/PRO – von CAN-Bus auf Profi-Bus DP Slave.
weiteren Protokolle waren auch auf spezielle Anfrage möglich.
Optionen zum Austausch des defekten GCP30
ist das eine Anlage mit MTU-MDEC – easYgen3500XTP2 + Option K58,
ist ein GW4 mit Profibus verbaut:
easYgen3200XT + Profibus Option (GW4 wird nicht mehr benötigt),
oder ein easYgen3200XT + Option K57 + altes GW4
ansonsten ein easYgen3200XT + IKD-Modul falls Ein-/Ausgänge nicht ausreichen.