kurze Einführung
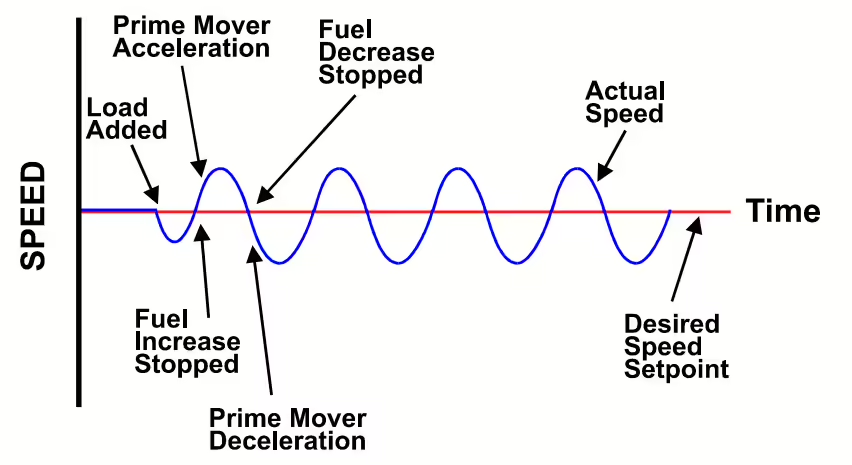
In Systemen ohne Droop tritt häufig ein solcher Effekt auf: Eine Laststeigerung führt dazu, dass der Motor langsamer wird. Der Drehzahlregler versucht, dies auszugleichen, indem er die Kraftstoffzufuhr erhöht, bis sich die normale Drehzahl stabilisiert hat.
Wenn der Drehzahlregler und die dynamischen Komponenten des Motors nicht optimal abgestimmt sind, kann es jedoch schnell passieren, dass der Regler den Motor übersteuert oder abbremst.
Diese Wechselwirkung wiederholt sich so lange, bis der Motor aufgrund einer Überdrehzahl abgeschaltet wird.
Kurz gesagt ist Droop eine lineare Funktion mit negativer Steigung, die von der Generatorleistung abhängt. Ich versuche hier zu erklären, wann sie notwendig ist und in welchen Fällen man ganz darauf verzichten kann.
Vor Beginn sollte man sich jedoch über die folgenden Begriffe im Klaren sein:
- Netzparallelbetrieb,
- Inselbetrieb,
- isochron und
- schließlich Droop.
Betriebsarten
Parallelbertrieb
Von Parallelbetrieb spricht man, wenn der Generator an ein stationäres System angeschlossen ist, dessen Frequenz sehr stabil ist und vom Generator nicht beeinflusst werden kann. Das beste Beispiel hierfür ist ein öffentliches Netz.
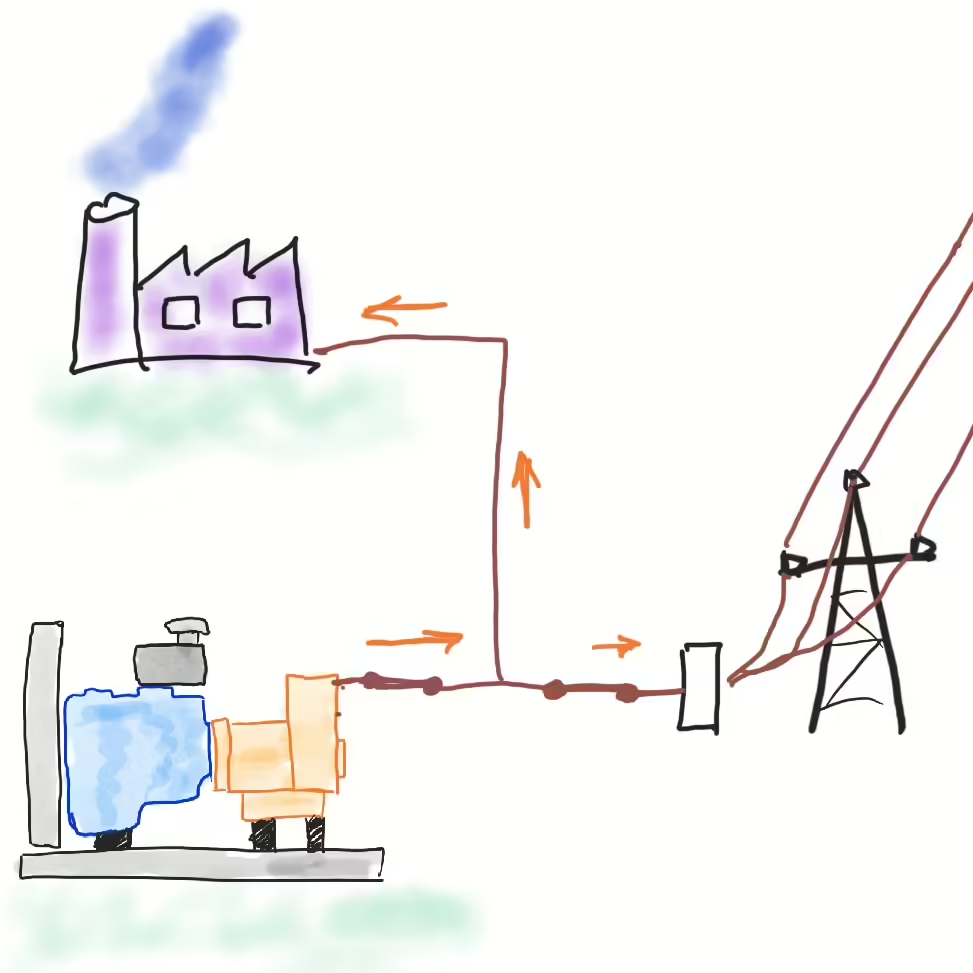
In diesem Bild ist ein Generator dargestellt, der gleichzeitig die Anlagen mit Strom versorgt und überschüssige Energie in das öffentliche Netz einspeist. Dies ist ein typisches Szenario für ein Blockheizkraftwerk.
Generator „dreht sich“ immer mit der Netzfrequenz, somit muss nur Generatorenleistung geregelt werden. Wird zu wenig Treibstoff dem Antrieb zugefügt, kann es sogar dazu kommen, dass der Generator vom Netz angetrieben wind. Bei zuviel, kann Generator überlastet werden.
Ähnlich der Leistung wird auch der Leistungsfaktor (cos PHI) anstelle der Generatorspannung geregelt.
Inselbetrieb
Wenn Stromerzeuger von dem Netz getrennt ist, spricht man von isoliertem- oder Inselbetrieb.
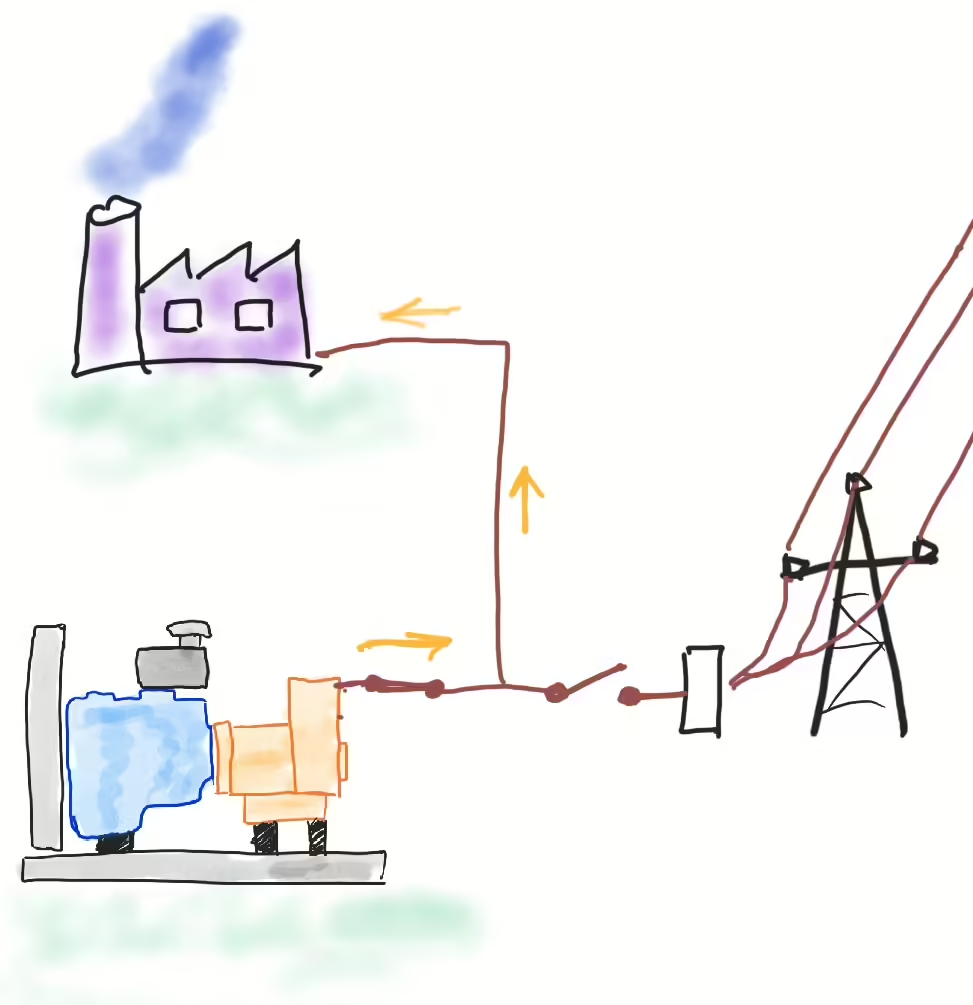
Im Gegensatz zum Netzparallelbetrieb ist die Generatorlast und die Blindleistung im Inselbetrieb von den Verbrauchern abhängig und die Aufgabe des Drehzahlreglers bzw. der Drehzahlregelung besteht darin, die Generatorfrequenz aufrecht zu erhalten. Die Spannung wird wiederum durch den automatischen Spannungsregler geregelt.
Solange es nur einen Erzeuger im System gibt, ist der Leistungsfluss überschaubar: Die gesamte erzeugte Energie wird vom Verbraucher aufgenommen.
Interessant wird es erst, wenn ein weiterer Erzeuger hinzukommt.
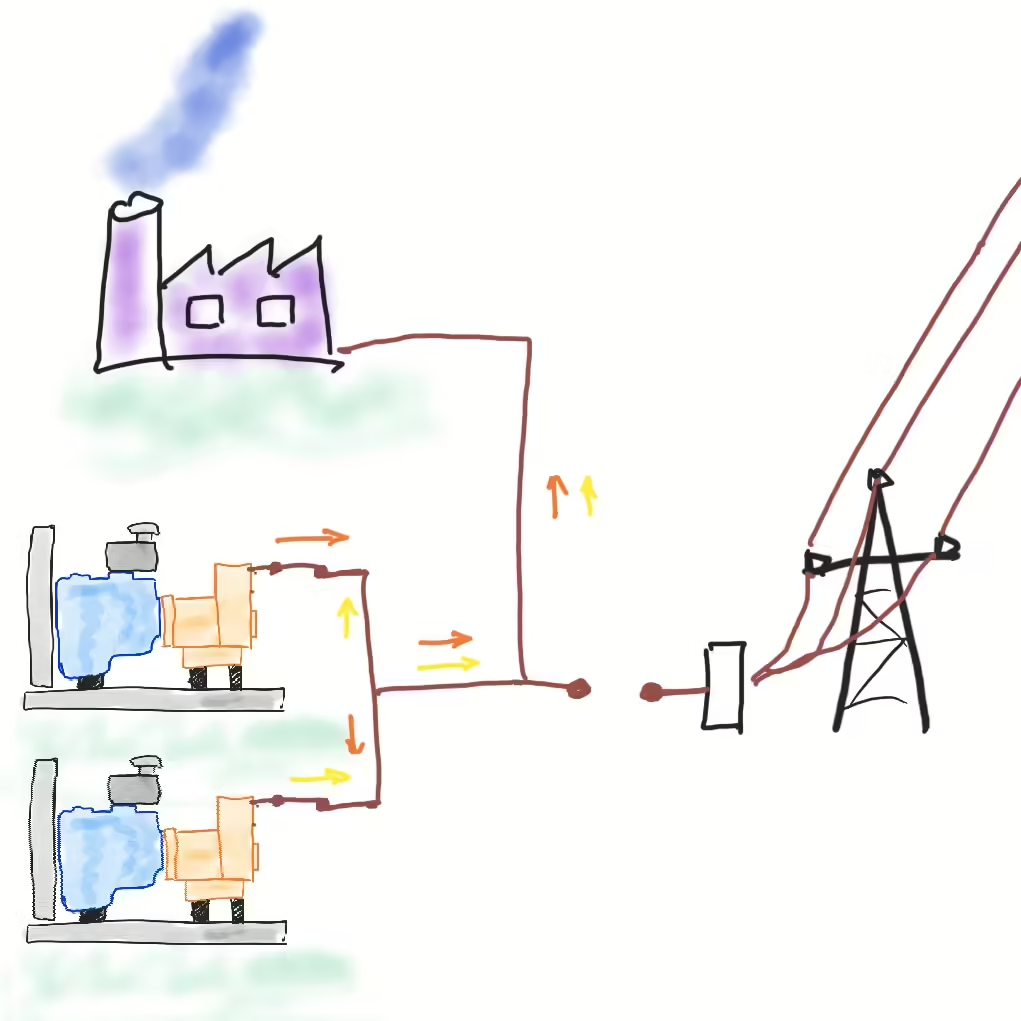
Ein Teil der erzeugten Energie geht nicht nur in das Werk, sondern auch in den anderen Erzeuger und solange beide mit gleicher Frequenz betrieben werden, ist dieser Leistungsfluss nicht vorhersehbar.
Entweder muss die Leistung wie beim Parallelbetrieb aktiv geregelt werden, oder die Erzeuger müssen nach der DROOP-Kennlinie gefahren werden.
Isochrone Betrieb im Isoliertem Netz
Isochrone Betrieb im isolierten Netz ist nur in zwei Fällen machbar:
- mit einem Erzeuger,
- bei zwei und mehr Erzeuger, wird Leistung aktiv verteilt.
Die Gesamtleistung des Systems berechnet sich nach der Gleichung:
Ps=P1 + P2.
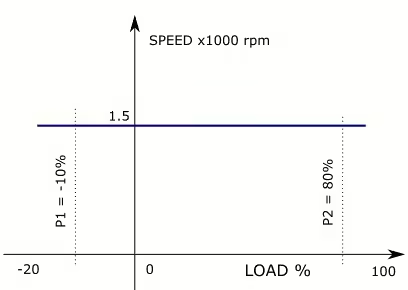
Die Generatorleistungen können alle möglichen Werte annehmen. In Grenzfällen kann sogar ein Generator den anderen in die Rückleistung zwingen wie in diesem Bild gezeigt wird.
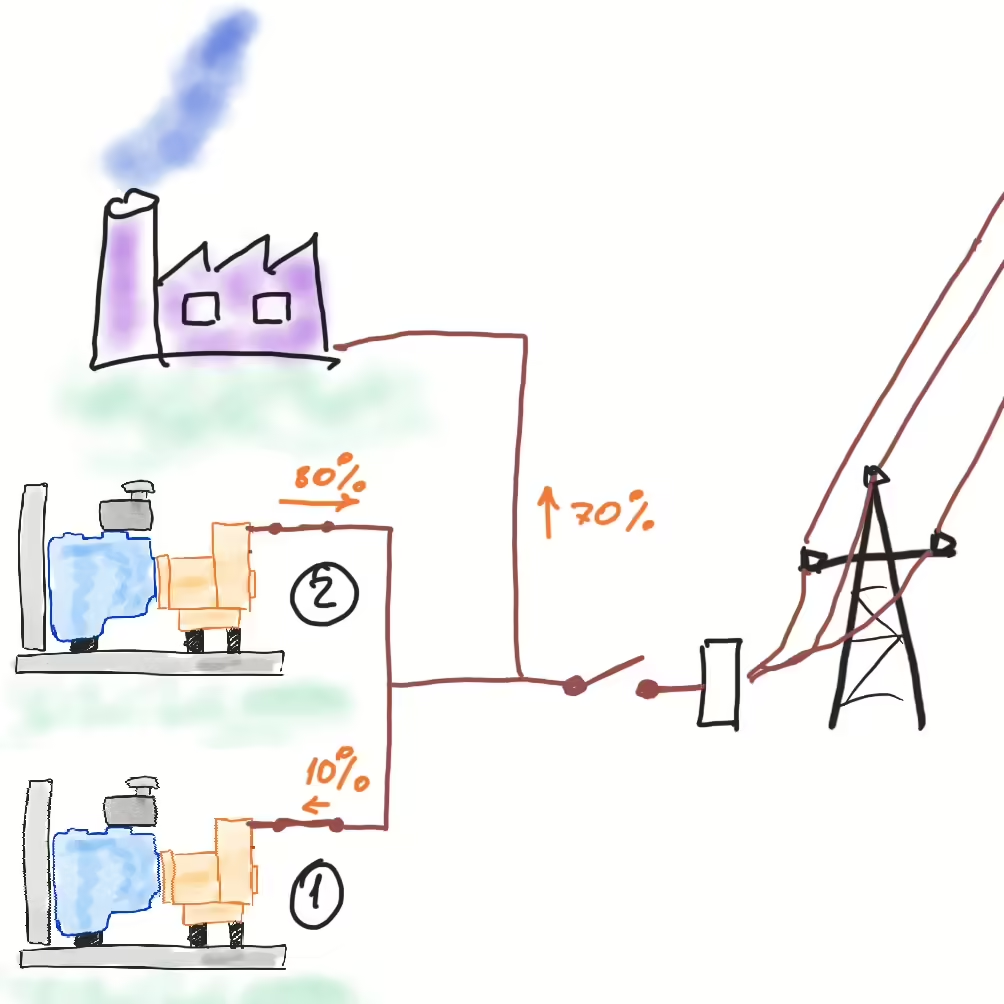
Vereinfacht kann dieses Phänomen so erklärt werden:
Im isolierten Betrieb ist die Generatorleistung eine Funktion der Frequenzdifferenz der beiden Generatoren. So lange Frequenzen gleich sind, werden Generatoren auch gleich belastet. In der Realität ist dies aber unmöglich und einer der Antriebe ist immer etwas schneller als der anderer.
Somit driften Belastungen immer weiter auseinander.
Dieses Diagramm zeigt isochrone Erzeuger, die in ein isoliertes Netz einspeisen und deren Leistung nicht geregelt wird.
DROOP im isolierten Betrieb
Um dem entgegenzuwirken, wird der DROOP (P-Grad) eingeführt. Dies ist ein Maß für die Änderung der Motordrehzahl bei Laständerungen. Manchmal wird auch die Rack-Position oder der Ausgang des elektrischen Drehzahlreglers verwendet. Die Solldrehzahl wird in diesem Fall nach der Formel berechnet:

Stellen wir uns vor, dass zu dem Zeitpunkt des Zuschaltens eines weiteren Motors ist ein Antrieb bereits auf 70% seiner Nennleistung belastet. Bei der Leerlaufdrehzahl 1500 RPM und DROOP 3% ergibt seine Drehzahl – 1468.5 RPM.
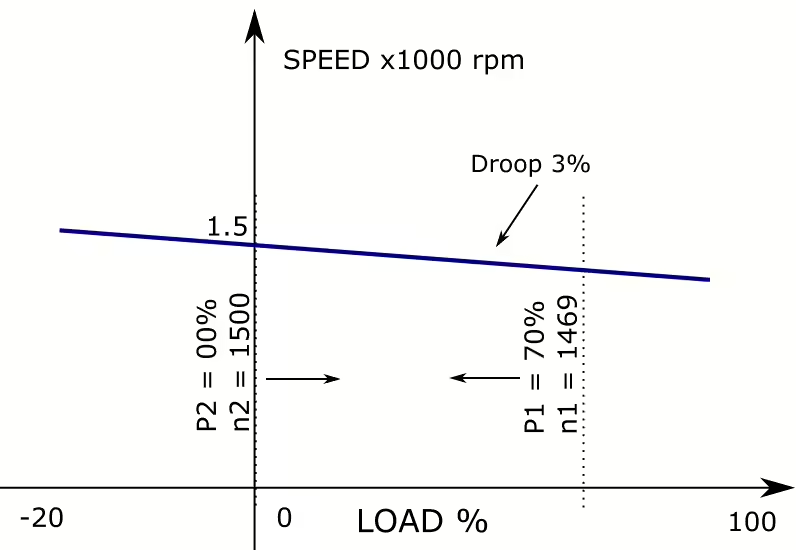
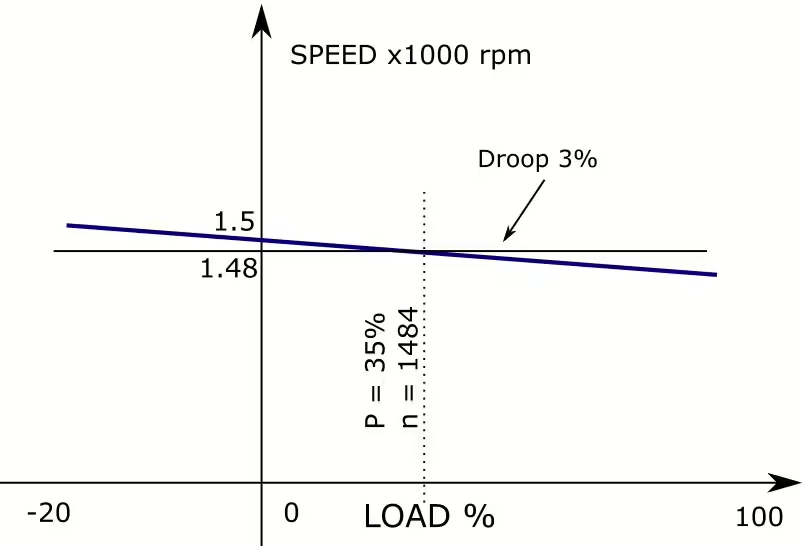
Nun wird die Kupplung bzw. der Leistungsschalter zugeschaltet. Da der zweite Antrieb schneller läuft, wird dieser stärker belasten und den ersten Motor automatisch entlasten, bis sie sich in der Mitte, bei 35% treffen:
Spannungsregler werden nach dem gleichen Prinzip gesteuert. Hier spricht man jedoch meist von Statik anstelle von DROOP.
Der maximale DROOP-Wert liegt meist im Bereich bis 4%. Dies hängt damit zusammen, dass die maximal zulässige Frequenz nach DIN 6280-13 – 52 Hz beträgt, was genau der Abweichung bei Volllast entspricht. In diesem Fall wird die Leerlaufdrehzahl auf 1560 U/min eingestellt. Im Volllastbereich reduziert sich die Drehzahl auf 1500 U/min.
Droop ist bei schnell wechselnder Last, insbesondere im Inselbetrieb, unverzichtbar.
Im Idealfall übernimmt eine dem Drehzahlregler übergeordnete Steuerung den Lastabgleich und die Lastverteilung, in der Praxis ist es jedoch die Aufgabe des Drehzahlreglers, die Grundlast anzupassen bzw. die Lasten exakt zu verteilen, da die mechanische Droop mit großen Abweichungen verbunden ist.